


食産業向けロボットSIerとして
長年培った実績とノウハウで
最先端の生産ラインをご提案
弊社では、1993年から米国食品ロボットメーカーのシステムインテグレーターを皮切りに、食産業ロボットSIerとしてロボットシステムの技術、ノウハウ、実績の蓄積に邁進して参りました。
ロボットSIerをスタートした当初は、弊社の創業当時からのノウハウ(不定形、不揃いな水産加工物の取り扱い)を強みとし、長年の食品加工装置で蓄積された食品加工基礎技術をベースに、ロボット技術と組み合わせることで、お客様の生産現場に「新たな価値」を見いだします。
近年では、独自開発した2D、3Dビジュアルセンサーとロボットを組み合わせたユニークなロボットシステムや、既設工場の設置スペースの課題に対し、より少ないロボットで、より多くの製品ハンドリングができる特殊な装置を開発し、お客様へご提案をさせて頂いております。

1997年 ちくわ箱詰めロボットライン

1996年 コロッケ段積み

1997年 サンマかば焼き缶投入ロボットライン
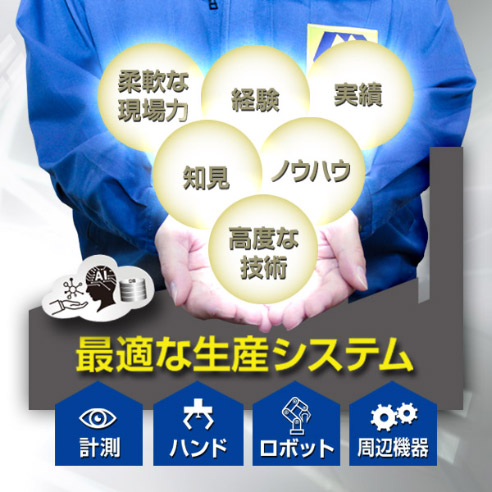
ニッコーが考えるロボットシステムとは
弊社のロボットシステムの考え方は、ロボットやハンドは主役ではなく全体システムの中の1つの重要な要素技術であり、部品の一部であると考えます。
実際の現場では、どんなに優秀で高速・高精度なロボットやハンドを持ってきても、それだけでは本来の目的である省人化・生産性向上・効率化にはつながりません。その優秀なロボットの性能をいかんなく発揮するには、そのロボットが最も早く効率的に作業が出来る「システム」を構築することにあると弊社では考えます。
ロボットシステムは往々にして既存設備の間に挟まれる事が多く、上流工程と下流工程との生産バランスを保ちながらロボットの性能を発揮させる必要があります。当然の如く上流工程の状況や下流工程の状況によって、工程間の物量バランスが崩れる事もあります。バランスが崩れた場合にも、ロボットシステムは柔軟に対応できなければならず、その考え方はたとえ製造品目が同じでも、お客様ごとの運用状況によって大きく変わります。
あくまで一例としてご紹介致しましたが、この様にロボットシステムが本来の目的を達成するためには、ロボットSIerがその現場ごとに最適化したシステムやラインとして設計する必要があり、より多くの「知見」と「高度な技術」、「ノウハウ」、「経験」、「実績」、「柔軟な現場力」がロボットライン導入の成否を決めると言っても過言ではないでしょう。
近年ロボットSIerの重要性が叫ばれておりますが、何故その業界に精通した経験豊富なSIerが重要なのか所以をご理解頂けましたら幸いです。
ロボットシステム納入実績
- ちくわ箱詰め(六軸多関節)
- 袋入り焼きそば箱詰め(直行)
- カートンパレタイザー(六軸多関節)
- 缶詰箱詰め(六軸多関節×2)
- とろろいもカウント移載(スカラ)
- サンマ蒲焼缶投入(六軸多関節×2)
- フライ製品箱詰め(六軸多関節)
- 青汁袋箱詰め(六軸多関節)
- パレタイザー(六軸多関節)
- アスパラ選別(パラレルリンク)
- シュウマイ箱詰め(六軸多関節×3)
- シュウマイ箱詰め(パラレルリンク×2)
- 小袋菓子包装機前整列(スカラ×2)
- ハンバーグパック箱詰め(直行×2)
- ミートボールパック箱詰め(直行×4)
- アイスカット装置(直行)
- シュウマイパックローダー(スカラ)
- コロッケ箱詰め(直行)
- ピザソース塗付(六軸多関節)
- シュウマイ真空包装機充填(六軸多関節×2)
- 冷凍パティ箱詰め(六軸多関節×2)
- プラグ供給(六軸多関節)
- 魚肉ソーセージ箱詰め(パラレルリンク)
- シュウマイピロー包装機移載(六軸多関節×2)
- 袋体パレタイザー(六軸多関節)



- パック豆腐番重充填(パラレルリンク)
- ケースパレタイザー(六軸多関節)
- 大葉選別(パラレルリンク)
- チーズ包装機移載(パラレルリンク×5)
- 個包装菓子トレー入れ(パラレルリンク×6)
- 小袋菓子集積(パラレルリンク×4)
- チーズトレー充填(パラレルリンク×12)
- 冷凍ピザライン(パラレルリンク×2)
- 厚揚げ豆腐トレー入れ(パラレルリンク×4)
- レトルトパック箱詰め(スカラ)
- ウインナー包装機移載(六軸多関節)
- ウインナー整列集積(パラレルリンク)
- ロースハム包装機移載(六軸多関節)
- カットベーコン包装機移載(六軸多関節)
- ホタテ原貝自動供給(パラレルリンク×2)
- コンデンスチューブ箱詰め(パラレルリンク)
- とろろ昆布パック箱詰め(六軸多関節)
- タルト生地トレー入れ(パラレルリンク×2)
- シュウマイピロー包装機移載(六軸多関節×2)
- カニカマ箱詰め(六軸多関節)
- 豚部分肉袋詰め(六軸多関節)
- 和菓子番重充填(六軸多関節×3)
- ヨーグルトケース移載(パラレルリンク)
- 他、ロボット搭載装置(六軸多関節×22)
- 他、ロボット搭載装置(直行×5)

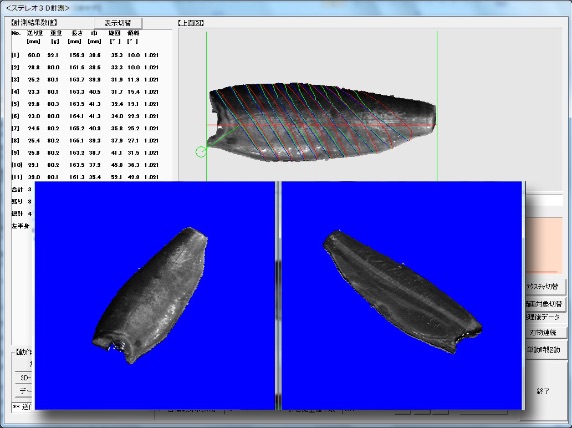
画像計測
食品加工の自働化は、不定形物を対象とした処理工程が多く、より精度の高い加工を要求された場合、計測技術は不可欠な技術であります。
その様な背景から弊社では、食品加工向けの計測技術が世の中に存在していない1994年頃から、2D計測、3D計測の独自技術を確立し、弊社で手がける自動機へ実装を開始致しました。業界初の計測技術を実装した自動機は、多くの食産業分野の課題解決へつながり革新技術として業界へ貢献しております。現在では、より高速・高精度に、よりコンパクトで使い勝手の良い計測技術へ進化し、計測する目的によって複数の計測手法からソリューションとして提供できるラインナップを図っております。今後は、AI・IOT・BigDataを代表とする革新技術との融合で、より価値のあるソリューションとしてご提案していきます。
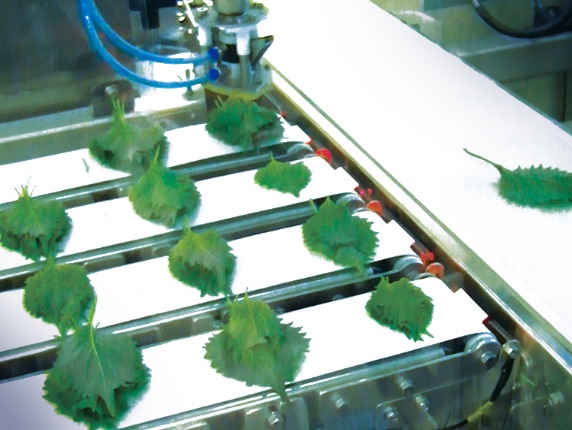
選別
ワークの形状や大きさ、重量などの基準値をプログラムし、カメラでワークの画像認識をおこない選別します。ロボットハンドもワークに合わせて設計し、ワークにダメージを与えることなくハンドリングします。
例えば写真の事例では、大葉を人が選別するとサイズ選別精度が悪くなり、クレームの対象になることや人手不足から自動選別を求められていました。
本装置に大葉を供給すると、カメラでワークの画像処理を行い、あらかじめ設定した大きさの基準で3サイズに選別し、パラレルリンクロボットが所定の位置に所定の枚数を移載します。
処理能力は100枚/分で、2.5倍の労働生産性をあげています。
集積・整列
ランダムに搬送されるワークの位置を画像処理で計測し、ロボットを使って規定の個数を集積・整列します。
ワークの向きを揃える・1列にする・段積みをするなど、ユーザーの工程に合わせた作業が可能です。
本事例はウィンナーの自動集積をロボットでおこないました。
コンベアにランダムで搬送されるウィンナーの位置と曲がりを画像処理で計測し、パラ
レルリンクロボットでウィンナーの曲がり方向に4本1グループになるように集積します。

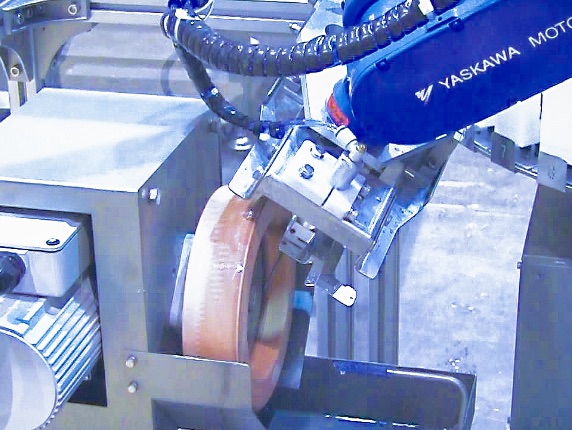
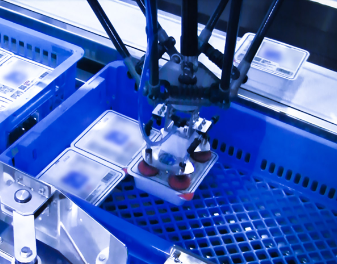
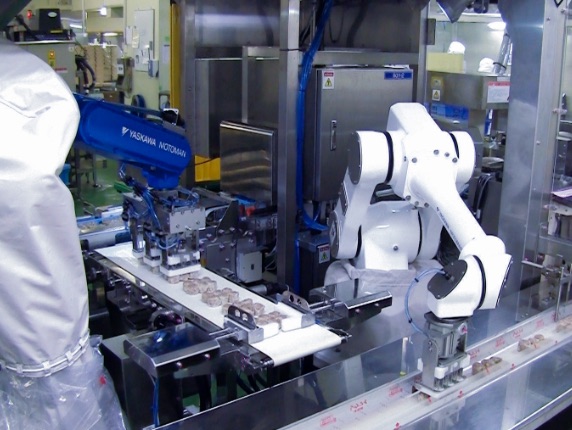
自動充填・トレー詰め
トレーや容器、包装機などへ自動充填をおこないます。
ワークは包装前の裸の製品が多いのですが、ワークの形状や性質に合わせたハンドを設計することはもちろん、投入時に入れ方によりワークがうまく入らずはみ出してしまうケースも考慮し、ロボットの選定や投入方法も視野に入れて設計しています。
本事例はシュウマイの包装機投入ラインで、蒸し器から流れてきたトレー入りのシュウマイをロボットが規定数を包装機へ移載するラインです。冷却工程後のトレー入りシュウマイを2台のロボットでピロー包装機へ移載します。ロボットの選定はロボットに剥離機構を設けるために多関節ロボットを使用しています。
シュウマイをトレーから剥がす剥離装置や、空になったトレーの段積み装置など、ロボット前後の周辺機器も含めた生産ラインになっています。
処理能力は30パック/分で、4倍の労働生産性をあげています。
箱詰め
主に包装品(袋詰め、容器詰めなど)を規定数段ボールケースなどに自動投入します。例えば、束にして結束したソーセージでは、3束・4束・5束と違う本数のものを規定の並べ方と数量を箱詰めするのですが、ソーセージが結束バンドの中で暴れて束になっているソーセージの断面形状が著しく変化します。
そのため吸着でハンドリングしようとすると、吸着面の形状が安定せずハンドリングミスを起こしやすくなります。
その解決方法として私たちは、吸着方式ではなく把持式ハンドを開発し、側面からソーセージの束を把持することで、発生する形状変化をハンド側で吸収できるよう構造を工夫し、本課題の解決につなげました。
処理能力は40〜60個/分で、2倍の労働生産性をあげています。

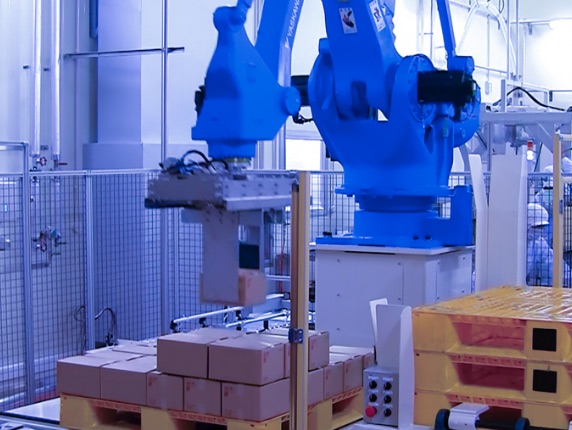
パレタイジング
パレタイジングとはパレット(pallet)の上に段ボール箱やクレート、袋物な
どの荷物を積み上げていく作業のことで、デパレタイジングはその逆にパレットから荷物を順次運び降ろす作業のことです。
このような作業に適するように設計され たロボットを「パレタイジング・ロボット」と言っています。荷物の上げ下ろし作業専門のロボットです。
私たちのパレタイジングシステムは、製品のバーコード認識情報をロボットに与え、製品がランダムに流れてきても的確に仕分けをし、指定された配列でパレタイジングや段積みをおこないます。人手では大変な作業も省人化が可能になります。